姿势设置
最終更新: 2020年7月3日
创建一个json格式的设置文件,以应用模型或动态创建的手臂切换机制。
【设置姿势的注意事项】
请务必在动画数据的“Live2D 部件显示”属性中将曲线设置为步。
(默认设置为步)
步
如果将其设置为另一条曲线,可能会导致意外移动。
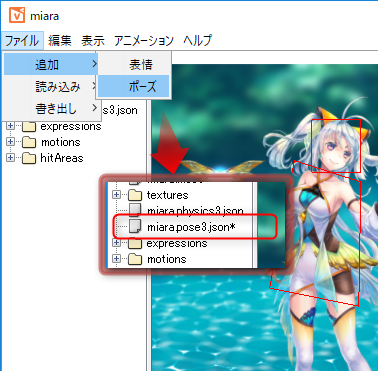
追加姿势设置
单击[菜单栏] → [文件] → [追加] → [姿势]。
追加了名为“pose3.json”的姿势设置。
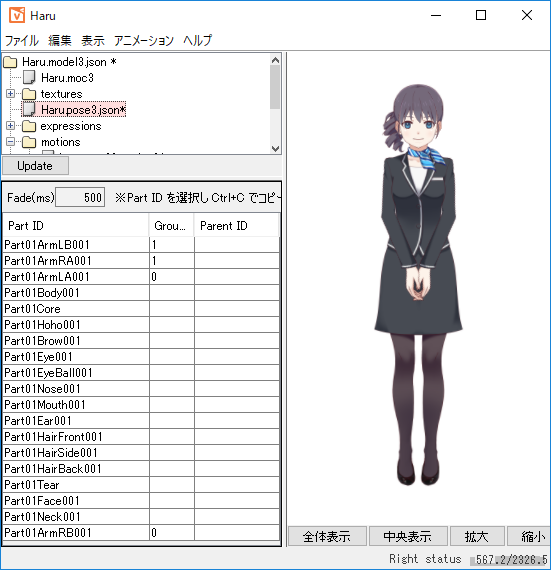
姿势组设置
单击pose.json可以看到的部件ID列表就是cmo3中创建的所有部件ID。
即使您已经根据服装创建了多个moc3,您也可以创建一个可以通用的姿势设置文件。
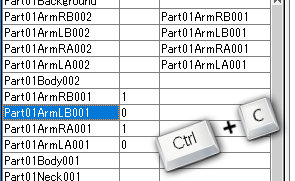
找到手臂部件ID并设置组号(group No.)。
属于同一组号的部件在该组中仅显示一个。
范例部件组成如下,所以组设置如上图所示。
- Part01ArmLA001 → 左臂 手臂组 A 服装1 → 0
- Part01ArmRA001 → 右臂 手臂组 A 服装1 → 1
- Part01ArmLB001 → 左臂 手臂组 B 服装1 → 0
- Part01ArmRB001 → 右臂 手臂组 B 服装1 → 1
范例手臂是通过分离左臂和右臂部件制成的,
对于为每个手臂组制作部件的简单配置,设置如下。
- Part01ArmA001 → 手臂组 A 服装1 → 0
- Part01ArmB001 → 手臂组 B 服装1 → 0
设置好之后,请导入播放对应手臂切换的动态。
如果设置正常,则手臂将切换。
动画器上与手臂切换对应的动态设置方法,请参考“创建有姿势切换的动态”。
姿势的父子设置
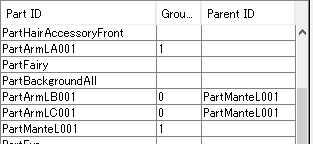
除了设置为通过动作显示或隐藏的手臂部件之外,为不同衣服的手臂部件设置“parent ID”,并创建父子结构。
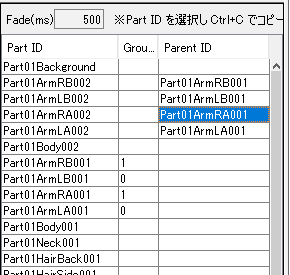
在parent ID栏中设置了父级的手臂部件将执行与父级部件相同的切换动作。
范例部件组成如下,所以组设置如上图所示。
- Part01ArmLA002 → 左臂 手臂组 A 服装 2 → Part01ArmLA001
- Part01ArmRA002 → 右臂 手臂组 A 服装 2 → Part01ArmRA001
- Part01ArmLB002 → 左臂 手臂组 B 服装 2 → Part01ArmLB001
- Part01ArmRB002 → 右臂 手臂组 B 服装 2 → Part01ArmRB001
在为每个手臂组制作部件先前的简单配置的情况下,设置如下。
- Part01ArmA002 → 手臂组 A 服装 2 → Part01ArmA001
- Part01ArmB002 → 手臂组 B 服装 2 → Part01ArmB001
Tips
您可以通过选择要设置为父级部件ID,并同时按下“Ctrl”键和“C”键来复制ID的文本。
Tips
如果要注册多个parent ID,首先考虑是否可以颠倒父子。
通过替换父子,可以在Viewer中表示。
替换前
手臂A → 无服装
手臂B → 带服装
手臂C → 带服装
替换后
手臂A
有服装 → 手臂B
有服装 → 手臂C
此时,请将子级侧的姿势设置编号设置为较小。
在处理姿势的Framework中,编号是从最小的编号开始计算的。
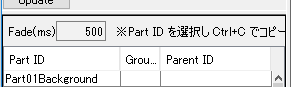
姿势渐变时间设置
您可以使用“Fade (ms)”滑块设置切换姿势的渐变时间。
默认值为500。
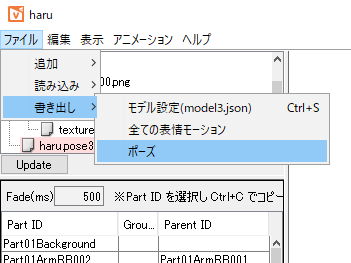
输出JSON设置文件
您可以通过单击[文件]菜单 → [输出] → [姿势设置],输出JSON设置文件。