Specifications of mocopi-compatible Parameters
nizima LIVE can animate the whole body of a Live2D model by acquiring information from mocopi.
This page summarizes the specifications of mocopi parameters in nizima LIVE; please refer to the contents of this page when creating mocopi-compatible models.
Auto-associated ID: Recommended parameter ID for creating mocopi-compatible models If you create each parameter of a Live2D model with this parameter ID, it will be automatically associated with the corresponding tracking item when the Live2D model is loaded into nizima LIVE.
Display name: Display name of each parameter in nizima LIVE
Minimum, default, and maximum values: These are the recommended values for parameter ranges for models used in nizima LIVE.
Face
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| Yaw | ParamAngleX | Face motion: left/right | -30 | 0 | 30 | Existing |
| Pitch | ParamAngleY | Face motion: up/down | -30 | 0 | 30 | Existing |
| Roll | ParamAngleZ | Face motion: rotation | -30 | 0 | 30 | Existing |
| RollRelative | ParamAngleZRelative | Face motion: rotation (relative) | -30 | 0 | 30 | Head rotation – Body rotation |
| PositionX | Face position X | -1 | 0 | 1 | Existing | |
| PositionY | Face position Y | -1 | 0 | 1 | Existing | |
| PositionZ | Face position Z | -1 | 0 | 1 | Existing |
- Position
- Difference from mocopi’s reference position in absolute coordinates
Body
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| HipAngleZ | HipAngleZ | Hip sway | -30 | 0 | 30 | Similar to Roll |
| TorsoAngleX | TorsoAngleX | Upper body rotation X | -30 | 0 | 30 | Similar to Yaw |
| TorsoAngleY | TorsoAngleY | Upper body rotation Y | -30 | 0 | 30 | Similar to Pitch |
| TorsoAngleZ | TorsoAngleZ | Upper body rotation Z | -30 | 0 | 30 | Similar to Roll |
| BodyPositionX | BodyPositionX | Whole body position X | -1 | 0 | 1 | Right hand direction is +. |
| BodyPositionY | BodyPositionY | Whole body position Y | -1 | 0 | 1 | Top is + |
| BodyPositionZ | BodyPositionZ | Whole body position Z | -1 | 0 | 1 | Front is + |
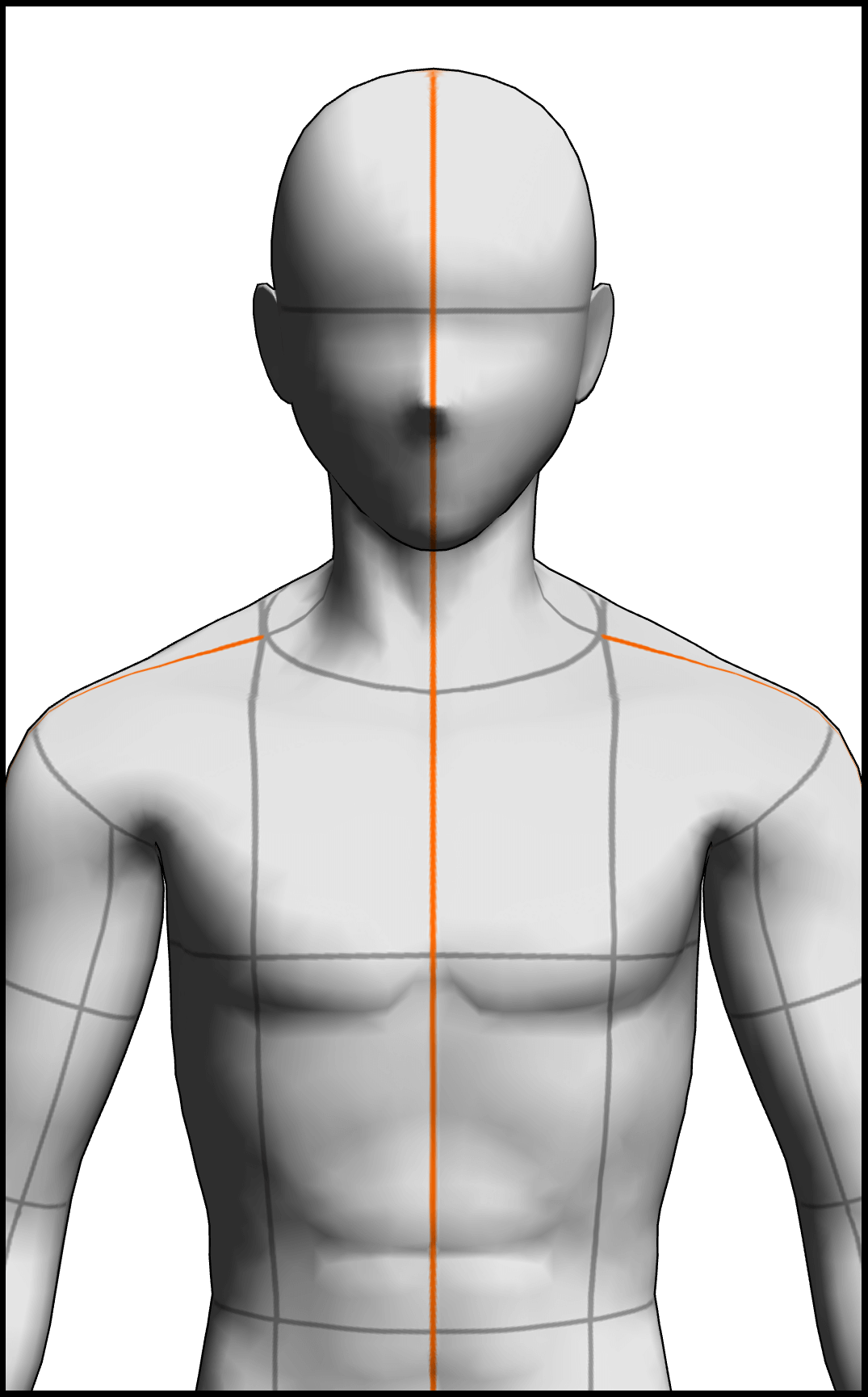
HipAngle image description
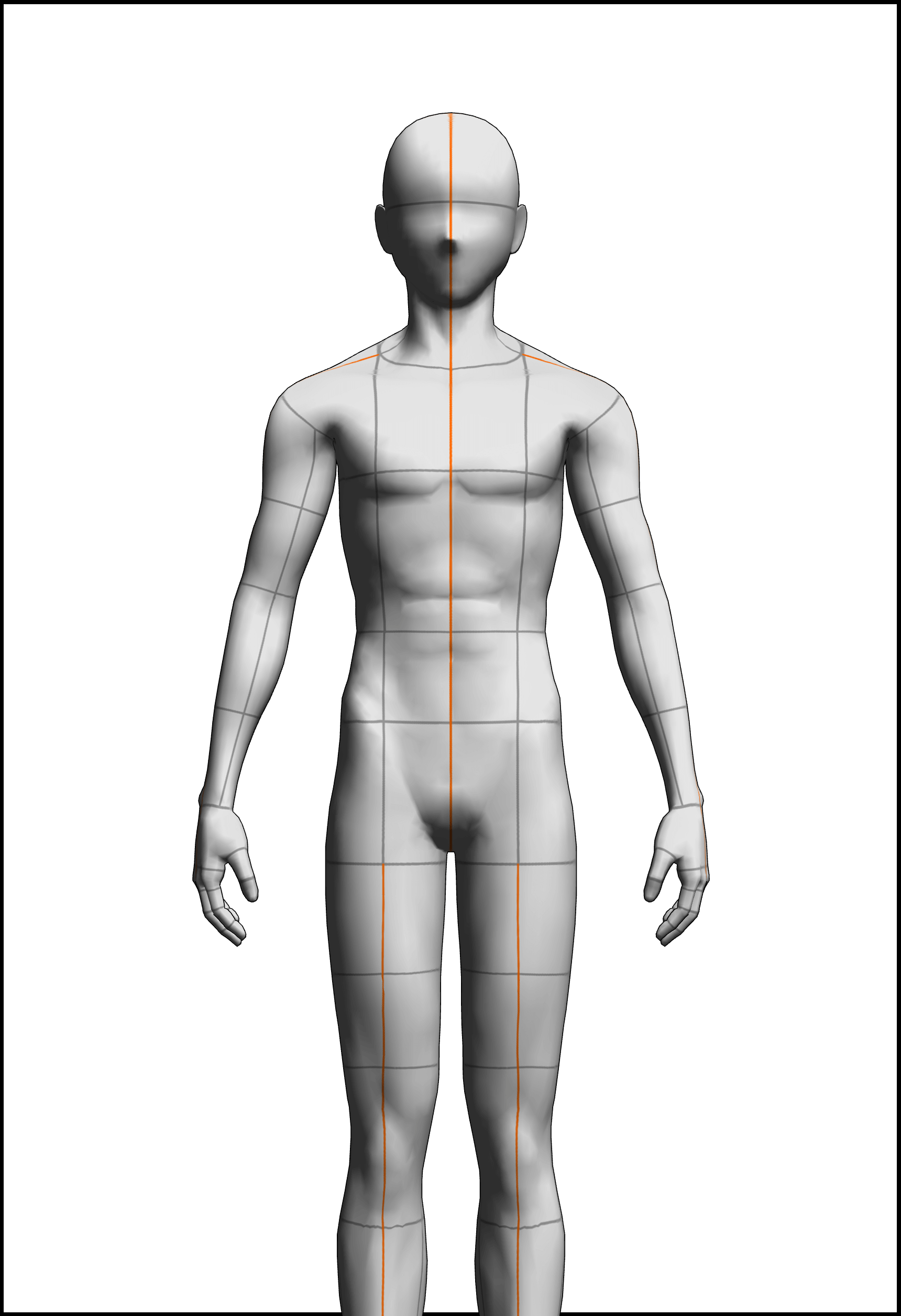 |  |
| Basic posture Upright | Rotation X Rotates the body in an upright position. |
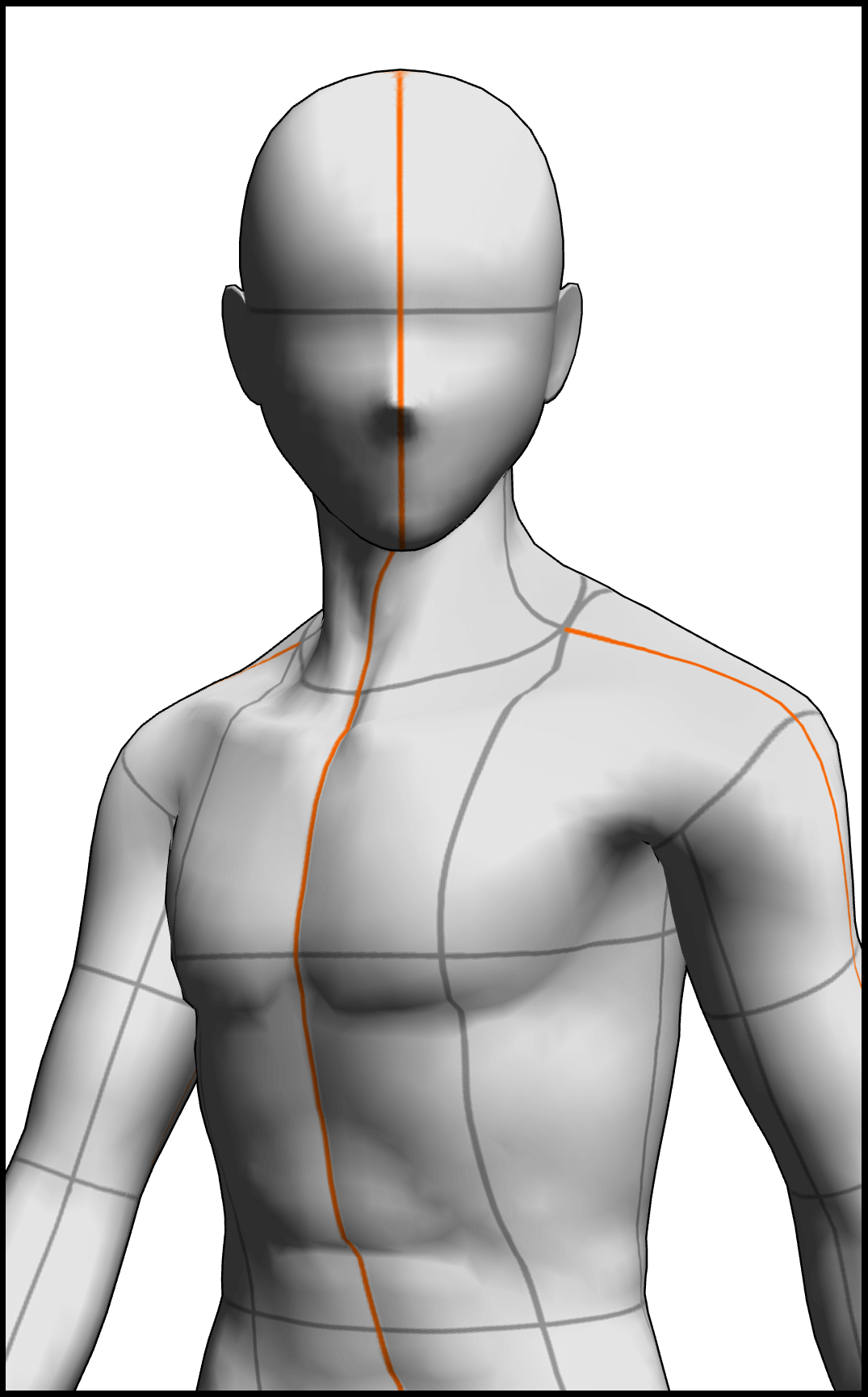
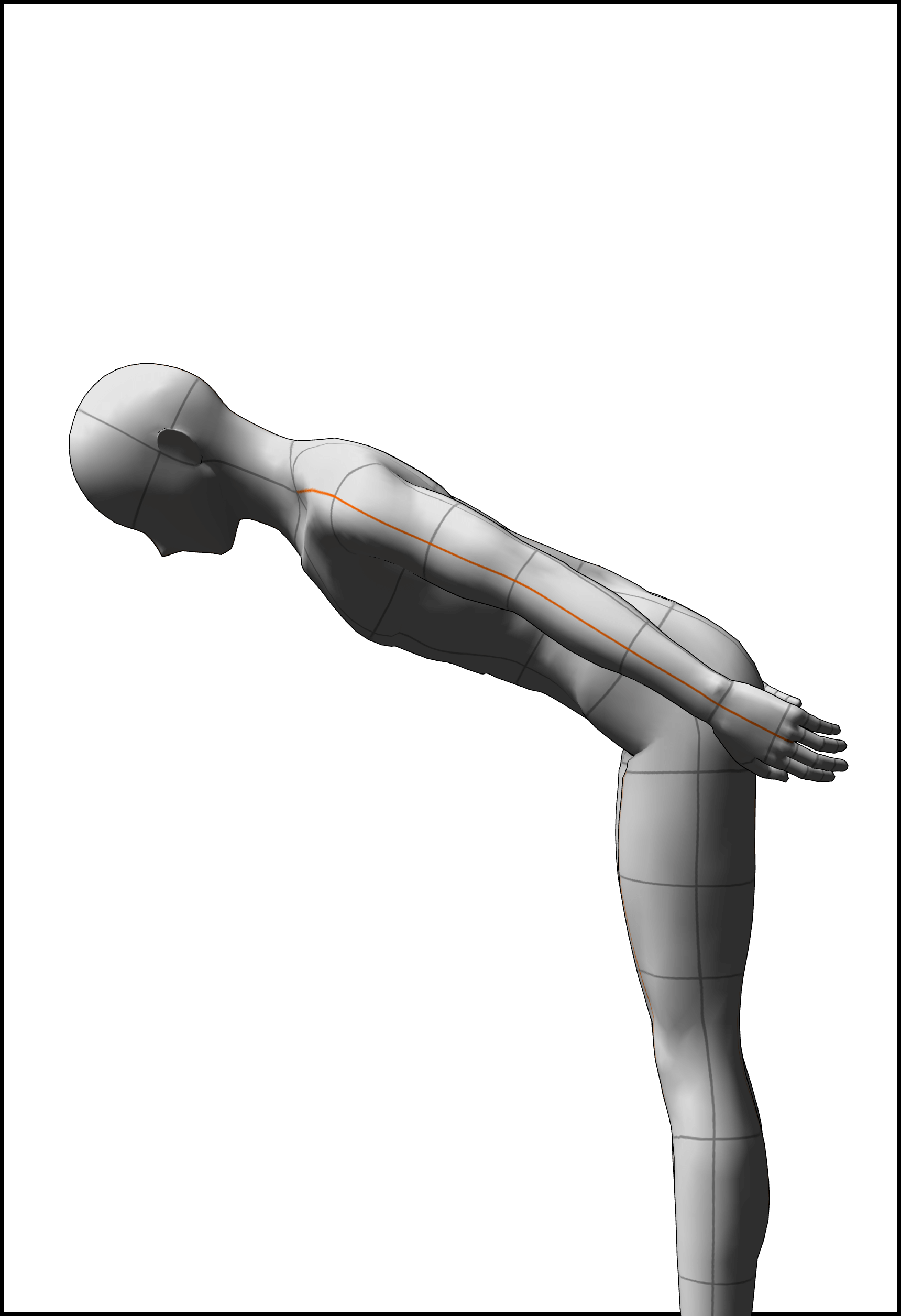 |  |
Rotation Y Bowing | Rotation Z Lifts one leg to the side. |
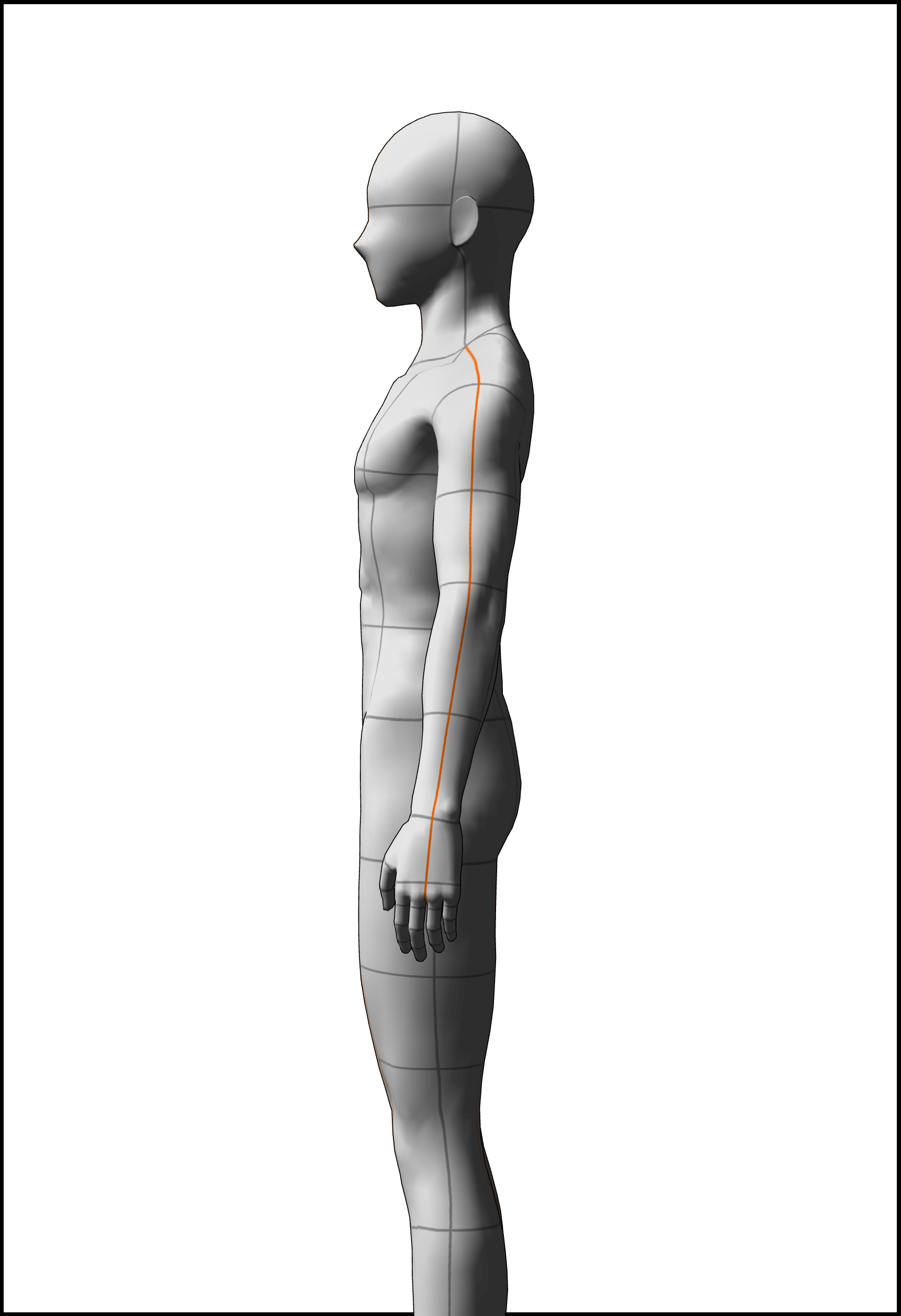
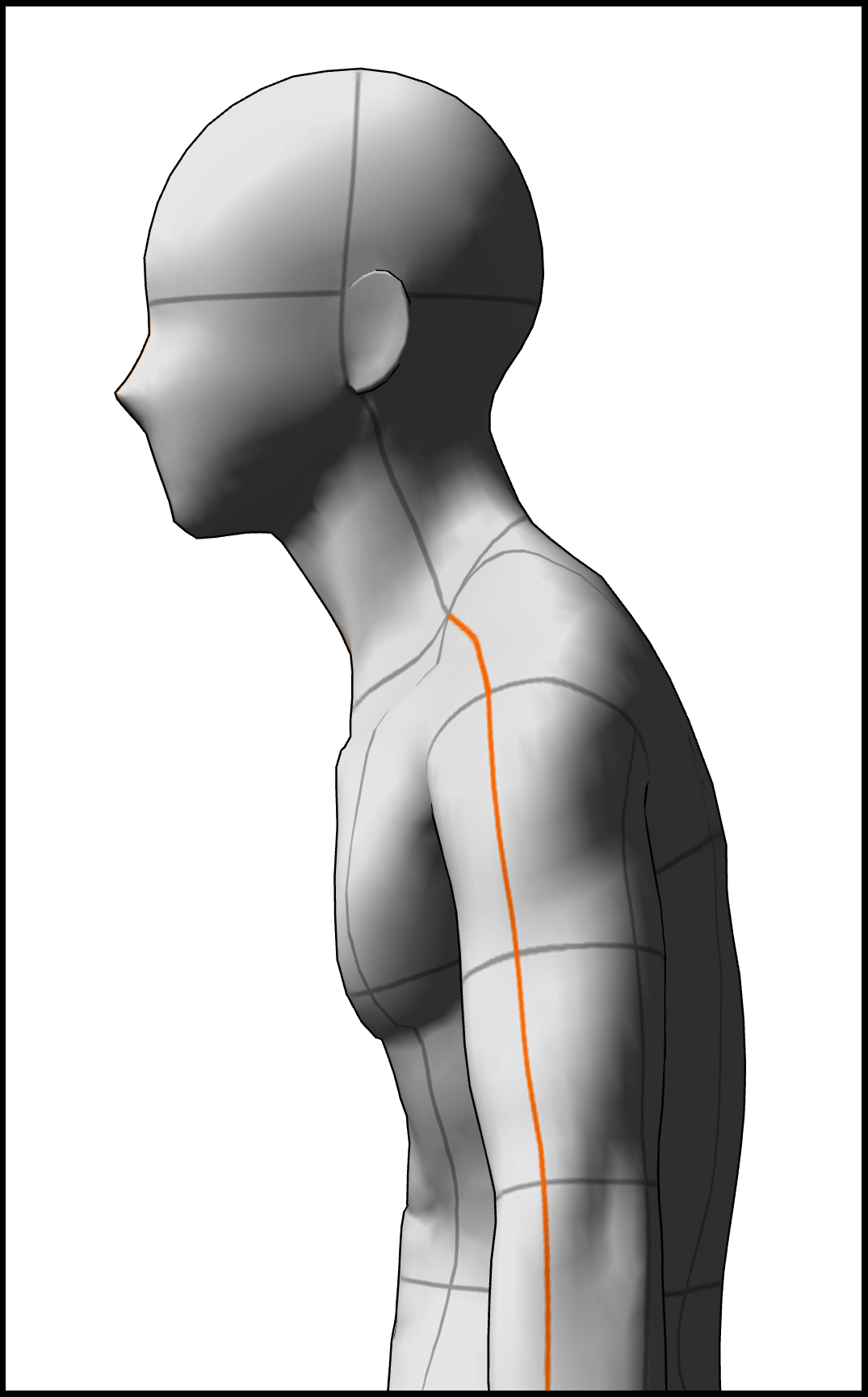
TorsoAngle image description
 |  |
| Basic posture Upright | Rotation X Twists the body. |
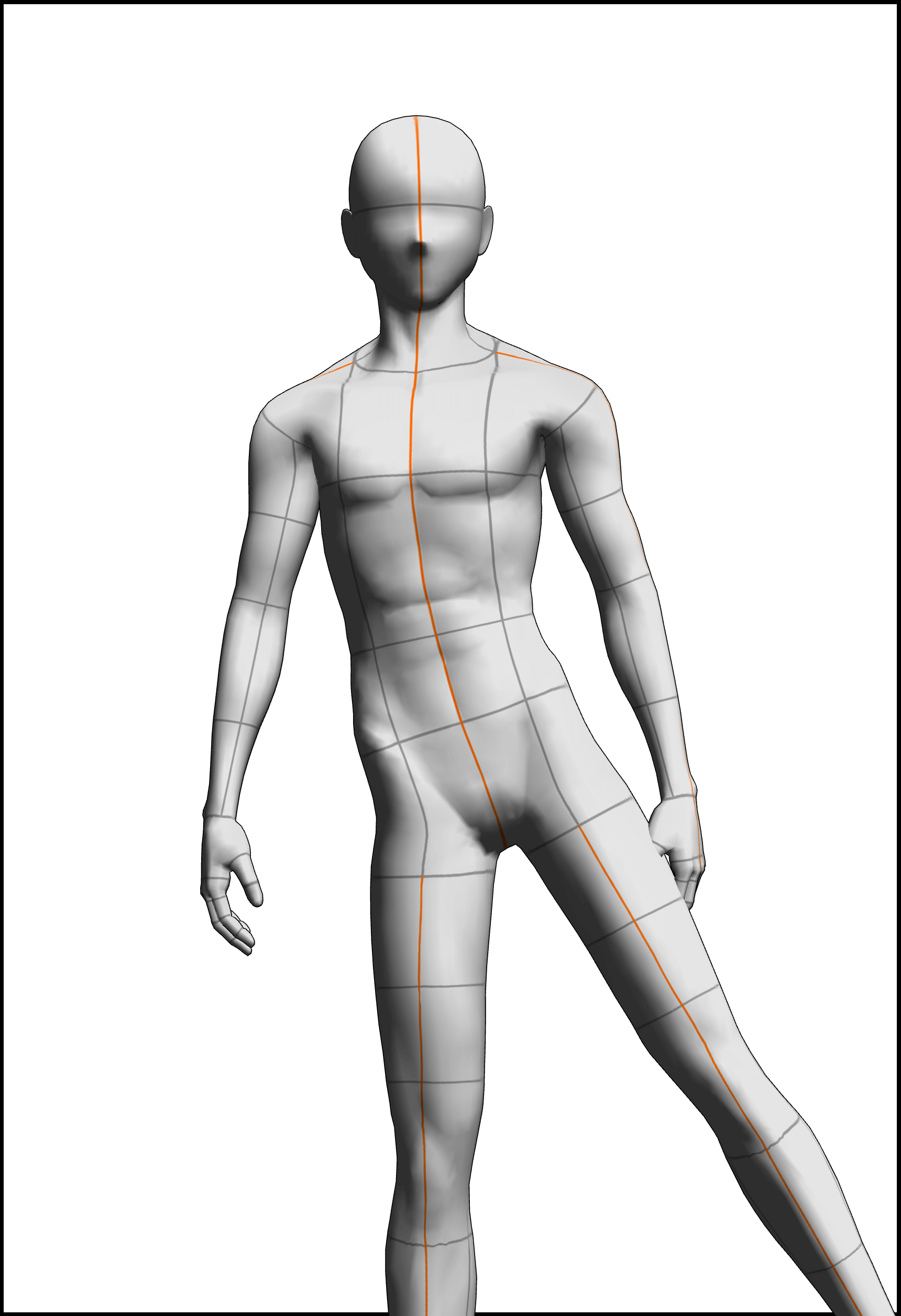
 | 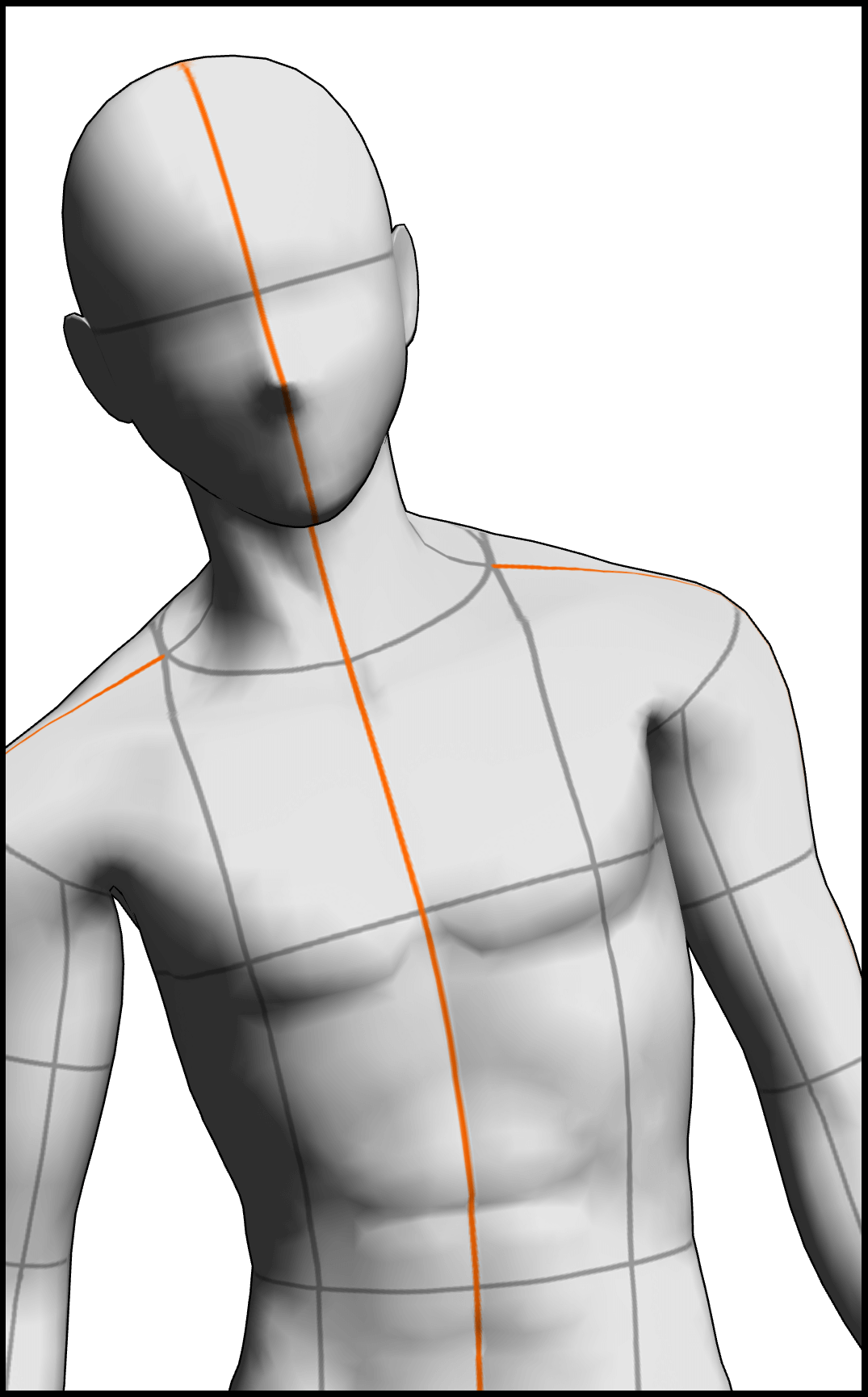 |
Rotation Y Slouching | Rotation Z Bends the body to one side. |
- BodyPositionX/Z
- Hip position
- Difference from mocopi’s reference position in absolute coordinates
- BodyPositionY
- The lower of the left and right hip joints
- Difference from mocopi’s reference position in absolute coordinates
Left arm
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| UpperArmLeftAngleY | UpperArmLeftAngleY | Left upper arm angle Y | -90 | 0 | 90 | Front is + |
| UpperArmLeftAngleZ | UpperArmLeftAngleZ | Left upper arm angle Z | -180 | 0 | 180 | 0 for the upright shin, + for the outside direction |
| UpperArmLeftAngleZRelative | UpperArmLeftAngleZRelative | Left upper arm angle Z (relative) | -180 | 0 | 180 | Left upper arm angle – Upper body rotation |
| LowerArmLeftAngleX | LowerArmLeftAngleX | Left forearm angle X | -180 | 0 | 180 | 0 for the front-facing palm, + when the little finger side moves forward |
| LowerArmLeftAngleY | LowerArmLeftAngleY | Left forearm angle Y | -90 | 0 | 90 | Front is + |
| LowerArmLeftAngleZ | LowerArmLeftAngleZ | Left forearm angle Z | -180 | 0 | 180 | 0 for the upright shin, + for the outside direction |
| LowerArmLeftAngleZRelative | LowerArmLeftAngleZRelative | Left forearm angle Z (relative) | -180 | 0 | 180 | Left forearm angle – Left upper arm angle |
| ElbowLeftAngle | ElbowLeftAngle | Left elbow angle | 0 | 0 | 180 | 0 for the straight knee, + when bent |
| ElbowLeftPositionX | ElbowLeftPositionX | Left elbow position X | -1 | 0 | 1 | Outside is + |
| ElbowLeftPositionY | ElbowLeftPositionY | Left elbow position Y | -1 | 0 | 1 | Top is + |
| ElbowLeftPositionZ | ElbowLeftPositionZ | Left elbow position Z | -1 | 0 | 1 | Front is + |
- ElbowLeftPosition
- Position of the elbow in relation to the shoulder
Right arm
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| UpperArmRightAngleY | UpperArmRightAngleY | Right upper arm angle Y | -90 | 0 | 90 | Front is + |
| UpperArmRightAngleZ | UpperArmRightAngleZ | Right upper arm angle Z | -180 | 0 | 180 | 0 for the upright shin, + for the outside direction |
| UpperArmRightAngleZRelative | UpperArmRightAngleZRelative | Right upper arm angle Z (relative) | -180 | 0 | 180 | Right upper arm angle – Upper body rotation |
| LowerArmRightAngleX | LowerArmRightAngleX | Right forearm angle X | -180 | 0 | 180 | 0 for the front-facing palm, + when the little finger side moves forward |
| LowerArmRightAngleY | LowerArmRightAngleY | Right forearm angle Y | -90 | 0 | 90 | Front is + |
| LowerArmRightAngleZ | LowerArmRightAngleZ | Right forearm angle Z | -180 | 0 | 180 | 0 for the upright shin, + for the outside direction |
| LowerArmRightAngleZRelative | LowerArmRightAngleZRelative | Right forearm angle Z (relative) | -180 | 0 | 180 | Right forearm angle – Right upper arm angle |
| ElbowRightAngle | ElbowRightAngle | Right elbow angle | 0 | 0 | 180 | 0 for the straight knee, + when bent |
| ElbowRightPositionX | ElbowRightPositionX | Right elbow position X | -1 | 0 | 1 | Outside is + |
| ElbowRightPositionY | ElbowRightPositionY | Right elbow position Y | -1 | 0 | 1 | Top is + |
| ElbowRightPositionZ | ElbowRightPositionZ | Right elbow position Z | -1 | 0 | 1 | Front is + |
Left hand
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| HandLeftFound | HandLeftFound | Left hand detection | 0 | 0 | 1 | Existing, + when the hand is raised |
| HandLeftAngleX | HandLeftAngleX | Left hand angle X | -180 | 0 | 180 | Existing, 0 for the front-facing palm, + when the little finger side moves forward |
| HandLeftAngleY | HandLeftAngleY | Left hand angle Y | -90 | 0 | 90 | Existing, front is +. |
| HandLeftAngleZ | HandLeftAngleZ | Left hand angle Z | -180 | 0 | 180 | Existing, 0 when the hand is turned upside down, outside is + |
| HandLeftPositionX | HandLeftPositionX | Left hand position X | -1 | 0 | 1 | Existing, outside is +. |
| HandLeftPositionY | HandLeftPositionY | Left hand position Y | -1 | 0 | 1 | Existing, top is +. |
| HandLeftPositionZ | HandLeftPositionZ | Left hand position Z | -1 | 0 | 1 | Existing, front is +. |
Right hand
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| HandRightFound | HandRightFound | Right hand detection | 0 | 0 | 1 | Existing, + when the hand is raised |
| HandRightAngleX | HandRightAngleX | Right hand angle X | -180 | 0 | 180 | Existing, 0 for the front-facing palm, + when the little finger side moves forward |
| HandRightAngleY | HandRightAngleY | Right hand angle Y | -90 | 0 | 90 | Existing, front is +. |
| HandRightAngleZ | HandRightAngleZ | Right hand angle Z | -180 | 0 | 180 | Existing, 0 when the hand is turned upside down, outside is + |
| HandRightPositionX | HandRightPositionX | Right hand position X | -1 | 0 | 1 | Existing, outside is +. |
| HandRightPositionY | HandRightPositionY | Right hand position Y | -1 | 0 | 1 | Existing, top is +. |
| HandRightPositionZ | HandRightPositionZ | Right hand position Z | -1 | 0 | 1 | Existing, front is +. |
Left leg
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| UpperLegLeftAngleY | UpperLegLeftAngleY | Left thigh angle Y | -30 | 0 | 30 | Front is + |
| UpperLegLeftAngleZ | UpperLegLeftAngleZ | Left thigh angle Z | -30 | 0 | 30 | 0 for the upright shin, + for the outside direction |
| LowerLegLeftAngleX | LowerLegLeftAngleX | Left shin angle X | -30 | 0 | 30 | 0 for the front-facing toe, + for the outside direction |
| LowerLegLeftAngleY | LowerLegLeftAngleY | Left shin angle Y | -30 | 0 | 30 | Front is + |
| LowerLegLeftAngleZ | LowerLegLeftAngleZ | Left shin angle Z | -30 | 0 | 30 | 0 for the upright shin, + for the outside direction |
| LowerLegLeftAngleZRelative | LowerLegLeftAngleZRelative | Left shin angle Z (relative) | -30 | 0 | 30 | Left shin angle – Left thigh angle |
| KneeLeftAngle | KneeLeftAngle | Left knee angle | 0 | 0 | 180 | 0 for the straight knee, + when bent |
| KneeLeftPositionX | KneeLeftPositionX | Left knee position X | -1 | 0 | 1 | Outside is + |
| KneeLeftPositionY | KneeLeftPositionY | Left knee position Y | -1 | 0 | 1 | Top is + |
| KneeLeftPositionZ | KneeLeftPositionZ | Left knee position Z | -1 | 0 | 1 | Front is + |
- KneeLeftPosition
- Position of the knee in relation to the hip joint
Right leg
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| UpperLegRIghtAngleY | UpperLegRIghtAngleY | Right thigh angle Y | -30 | 0 | 30 | Front is + |
| UpperLegRightAngleZ | UpperLegRightAngleZ | Right thigh angle Z | -30 | 0 | 30 | 0 for the upright shin, + for the outside direction |
| LowerLegRIghtAngleX | LowerLegRIghtAngleX | Right shin angle X | -30 | 0 | 30 | 0 for the front-facing toe, + for the outside direction |
| LowerLegRIghtAngleY | LowerLegRIghtAngleY | Right shin angle Y | -30 | 0 | 30 | Front is + |
| LowerLegRightAngleZ | LowerLegRightAngleZ | Right shin angle Z | -30 | 0 | 30 | 0 for the upright shin, + for the outside direction |
| LowerLegRightAngleZRelative | LowerLegRightAngleZRelative | Right shin angle Z (relative) | -30 | 0 | 30 | Right shin angle – Right thigh angle |
| KneeRightAngle | KneeRightAngle | Right knee angle | 0 | 0 | 180 | 0 for the straight knee, + when bent |
| KneeRightPositionX | KneeRightPositionX | Right knee position X | -1 | 0 | 1 | Outside is + |
| KneeRightPositionY | KneeRightPositionY | Right knee position Y | -1 | 0 | 1 | Top is + |
| KneeRightPositionZ | KneeRightPositionZ | Right knee position Z | -1 | 0 | 1 | Front is + |
Left foot
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| FootLeftPositionX | FootLeftPositionX | Left foot position X | -1 | 0 | 1 | Outside is + |
| FootLeftPosisionY | FootLeftPosisionY | Left foot position Y | -1 | 0 | 1 | Top is + |
| FootLeftPositionZ | FootLeftPositionZ | Left foot position Z | -1 | 0 | 1 | Front is + |
- Position of the ankle in relation to the hip joint
Right foot
| ID | Auto-associated ID | Display name | Minimum | Default | Maximum | Remarks |
|---|---|---|---|---|---|---|
| FootRightPositionX | FootRightPositionX | Right foot position X | -1 | 0 | 1 | Outside is + |
| FootRightPositionY | FootRightPositionY | Right foot position Y | -1 | 0 | 1 | Top is + |
| FootRightPositionZ | FootRightPositionZ | Right foot position Z | -1 | 0 | 1 | Front is + |
Was this article helpful?
YesNo