参数控制器运用指南
最終更新: 2025年2月4日
本页总结了有效使用参数控制器的技巧。
我们将从常见错误和常见陷阱到高级用户的高级技术进行广泛说明。
学习实用技巧来优化性能并获得有效操作。
请参阅下文了解参数控制器的基本用法。
“参数控制器的基本操作”(教程视频)
“关于参数控制器”
“控制器目标设置”
关于易于用控制器控制的模型结构
使参数变化量与动作变化量相匹配
参数控制器在批量控制参数时,寻找最佳参数值。
通过调整参数与动作变化量的比例,可以更容易地找到最佳参数值。
当创建手臂或腿部等较大的旋转动作时,建议设置与角度相匹配的键值。
减少了控制期间所需的计算量,使顺畅动作的创建更加容易。
首先,在默认位置设置基准角度。
单击红框下方的[设置基准角度]按钮,角度项目将会被替换为0度。
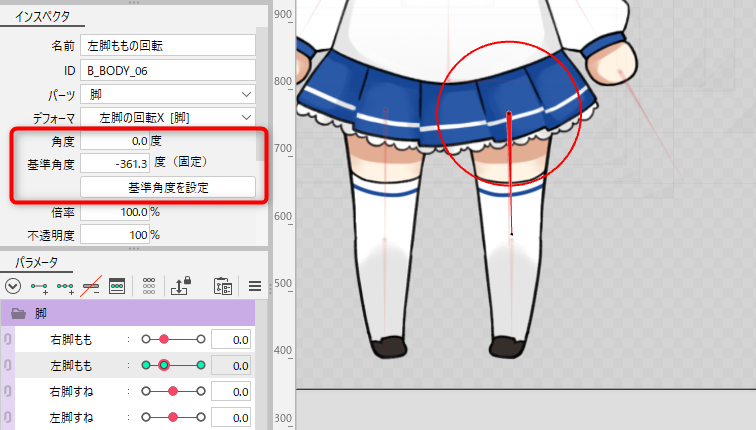
在这个模型中,我们设置左脚向内旋转30度,向外旋转60度的动作。
通过输入实际数值进行调整,使得左键为30度,右键为-60度。
TIPS
使参数的变化量与动作的变化量相匹配很重要,因此使用1/10规模的角度数值就可以了。
例如:-30, 0, 60 → -3, 0, 6
匹配相关参数的键值
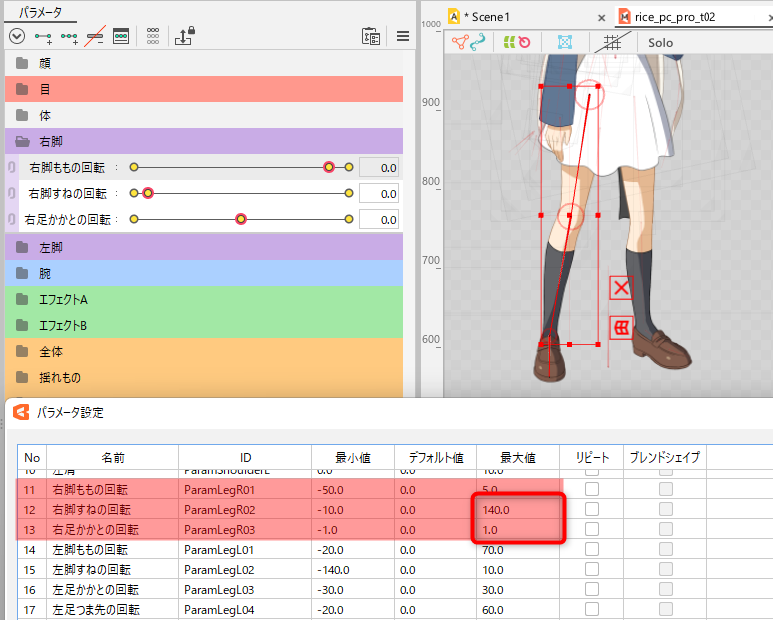
设置腿部旋转等角度时,键值可能会超过100。
以下模型中,“脚跟旋转”的数值极小,范围从-1.0到1.0,而且它与“小腿旋转”的最大值与最小值相差很大,因此可能很难确定最佳参数。
通过将“脚跟旋转”匹配实际角度数值,可以减少计算负载并实现更顺畅的动作。
如果在操作控制器时动作变得迟钝,请确认相关参数的键值。
控制器操作技巧
如何选择和编辑重叠控制器
设置目标可能会导致控制器重叠。
可以通过单击来交替选择重叠的控制器。
此外,您可以通过单击检查器的[变更]按钮来变更与重叠图形网格控制器的关联。
如何检查计算单元
控制器的计算顺序会影响最终的外观。
在下面的例子中,蓝色跟随红色目标,黄色跟随绿色目标。
然而,当黄色跟随绿色移动时,它的位置略有偏移。
它没有跟随预期位置的原因是由于控制器的计算顺序。
在“顺序2”中计算黄色跟随绿色后再按“顺序4”计算蓝色跟随红色。
由于绿色受到之后计算的蓝色的影响而移动,导致黄色参考绿色的过去位置。
只要稍微移动控制器,就会按照设置的顺序进行计算,因此为了让黄色跟随绿色,需要改变计算顺序。
在这种情况下,[提示]显示arm1为蓝色,背景为绿色。
绿色背景表示通过改变顺序可以解决这个问题,并使控制器按照计算的位置移动,如下所示。
此外,通过按下计算单元设置对话框的[自动]按钮,可以自动对具有绿色背景的提示进行排序以产生计算结果。
TIPS
提示(绿色)或提示(红色)状态仅表示计算结果不是推荐的结果。
如果播放动态并且其按预期动作,则即使提示中显示状态也没有问题。
跟随目标的优势
通过让控制器跟随,可以在动画中创建父子结构。
下图模型的目标设置为弓上挂着一支箭,左手上则挂着一个靶子。
各部位只进行简单的旋转和移动动作,通过目标跟随控制复杂的动作。
目标也可以轻松替换,其优势在于可以轻松在动画上进行尝试。
通过以这种方式运用目标跟随,您可以灵活地创建动态并减少在建模之间来回切换的需要。
创建行走动态
为了将腿放在地面上,您需要准备一个目标用图形网格。
对于2D角色,可以使用单个目标,但通过准备分为“脚趾”和“脚跟”的目标模型,可以提高质量。
以下目标模型具有全体移动、旋转、宽度调整等参数,可以通过控制器轻松移动。
目标模型可以是圆形等简单结构,但其形状应使得易于将控制器放置在中心。
首先,将目标模型导入到动画中,并将其与脚趾和脚跟对齐。
使腿部跟随目标并将参数关联到每个控制器。
有关如何跟随的信息,请参考参数控制器中的“控制器目标设置”。

这使得腿部能够根据目标模型轨道的操作一起移动。
这也使得坐下并双脚着地等动作变得更容易。
TIPS
当腿直立时,有时计算不起作用,膝盖不会弯曲。
在这种情况下,请关闭目标跟随,弯曲膝盖,然后重新打开目标跟随。
以同样的方式,为左腿设置目标并创建行走动画。

失去目标位置关系时该怎么办
执行[复原]等操作后,与目标的位置关系可能会发生较大扭曲。
这种情况下,可以通过移动时间线上的关键帧来更新并恢复正常。