mocopi対応パラメータの仕様
nizima LIVEでは、mocopiからの情報を取得してLive2Dモデルの全身を動かすことができます。
このページでは、nizima LIVEにおけるmocopiパラメータの仕様をまとめています。mocopi対応モデル制作の際にはこのページの内容をご参照ください。
自動紐づけID:mocopi対応モデル作成時の推奨パラメータIDです。このパラメータIDでLive2Dモデルの各パラメータを作成すると、nizima LIVEにLive2Dモデルを読み込んだ際、対応するトラッキング項目に自動的に紐付けられます。
表示名:nizima LIVE上での各パラメータの表示名です。
最小値・デフォルト値・最大値:nizima LIVE で使用するモデルにおけるパラメータ範囲の推奨値です。
顔
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| Yaw | ParamAngleX | 顔の左右の動き | -30 | 0 | 30 | 既存 |
| Pitch | ParamAngleY | 顔の上下の動き | -30 | 0 | 30 | 既存 |
| Roll | ParamAngleZ | 顔の回転の動き | -30 | 0 | 30 | 既存 |
| RollRelative | ParamAngleZRelative | 顔の回転の動き(相対) | -30 | 0 | 30 | 頭の回転 – 胴体の回転 |
| PositionX | 顔の位置X | -1 | 0 | 1 | 既存 | |
| PositionY | 顔の位置Y | -1 | 0 | 1 | 既存 | |
| PositionZ | 顔の位置Z | -1 | 0 | 1 | 既存 |
- Position
- 絶対座標で mocopi の基準位置からの差分
体
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| HipAngleZ | HipAngleZ | 腰の横振り | -30 | 0 | 30 | Roll に類似 |
| TorsoAngleX | TorsoAngleX | 上半身の回転X | -30 | 0 | 30 | Yaw に類似 |
| TorsoAngleY | TorsoAngleY | 上半身の回転Y | -30 | 0 | 30 | Pitch に類似 |
| TorsoAngleZ | TorsoAngleZ | 上半身の回転Z | -30 | 0 | 30 | Roll に類似 |
| BodyPositionX | BodyPositionX | 全身の位置X | -1 | 0 | 1 | 右手方向が+ |
| BodyPositionY | BodyPositionY | 全身の位置Y | -1 | 0 | 1 | 上が+ |
| BodyPositionZ | BodyPositionZ | 全身の位置Z | -1 | 0 | 1 | 前が+ |
HipAngle の画像解説
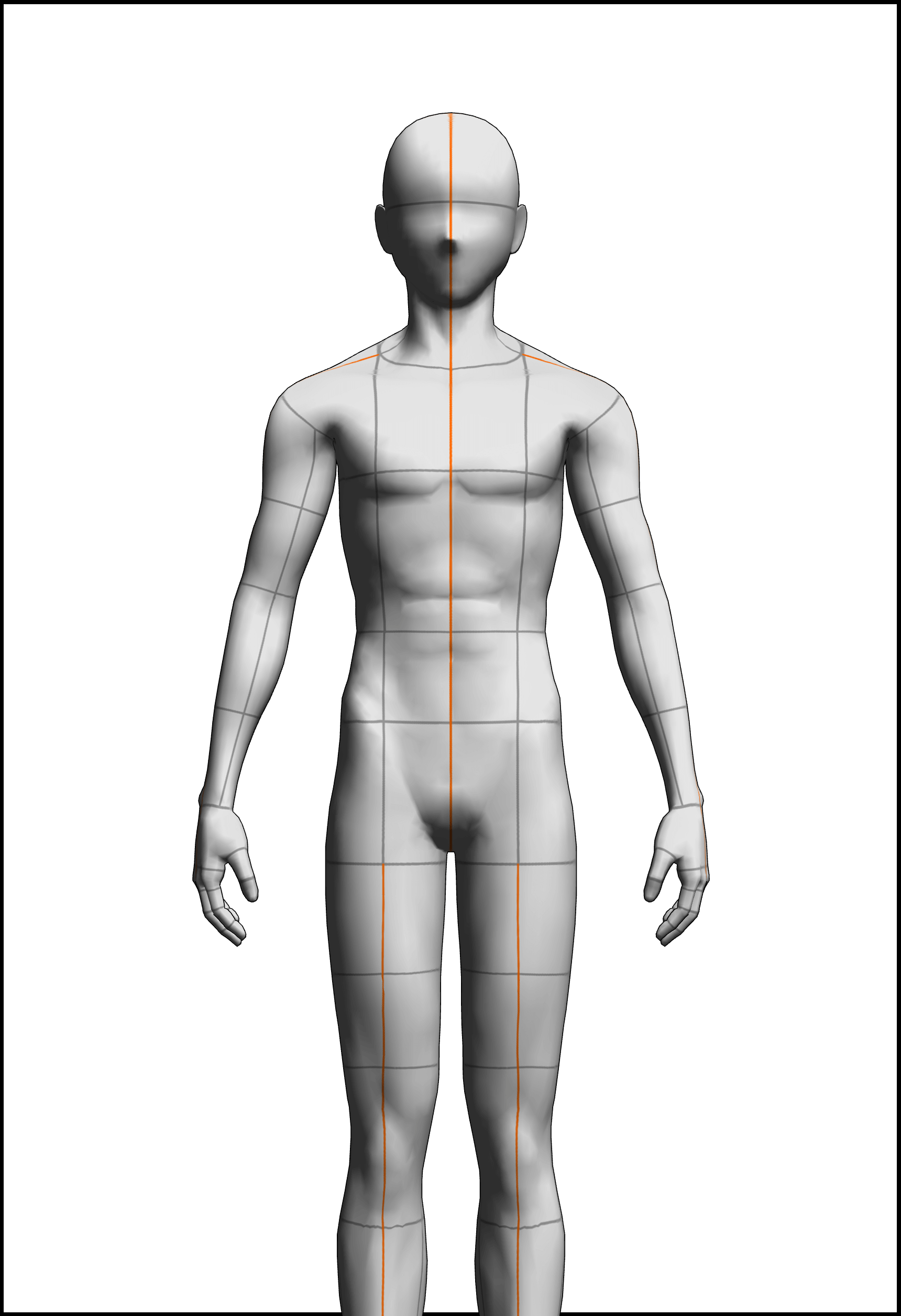 |  |
| 基本状態 直立 | 回転X 直立のまま回転 |
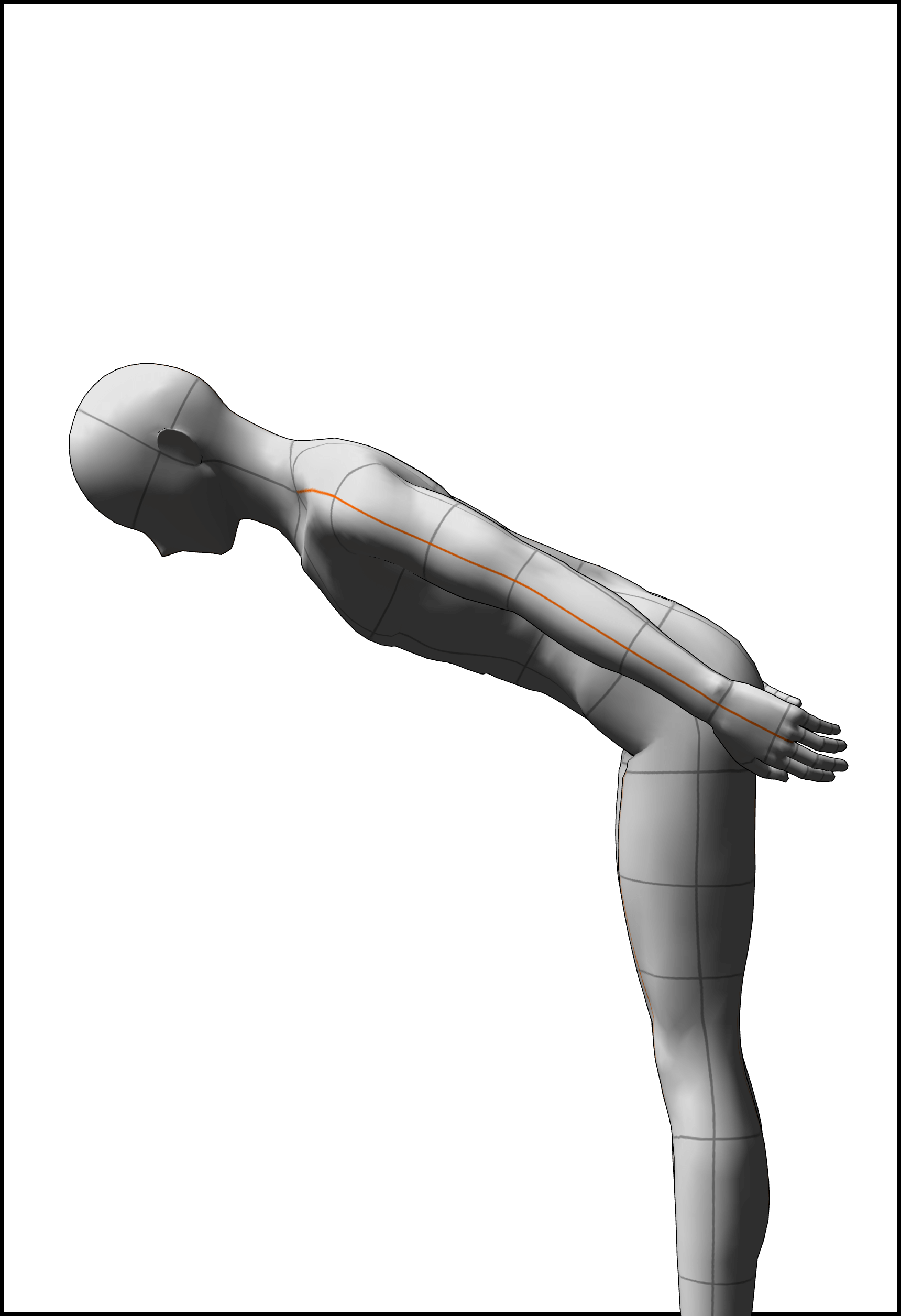 |  |
回転Y お辞儀 | 回転Z 片足を横にあげる |
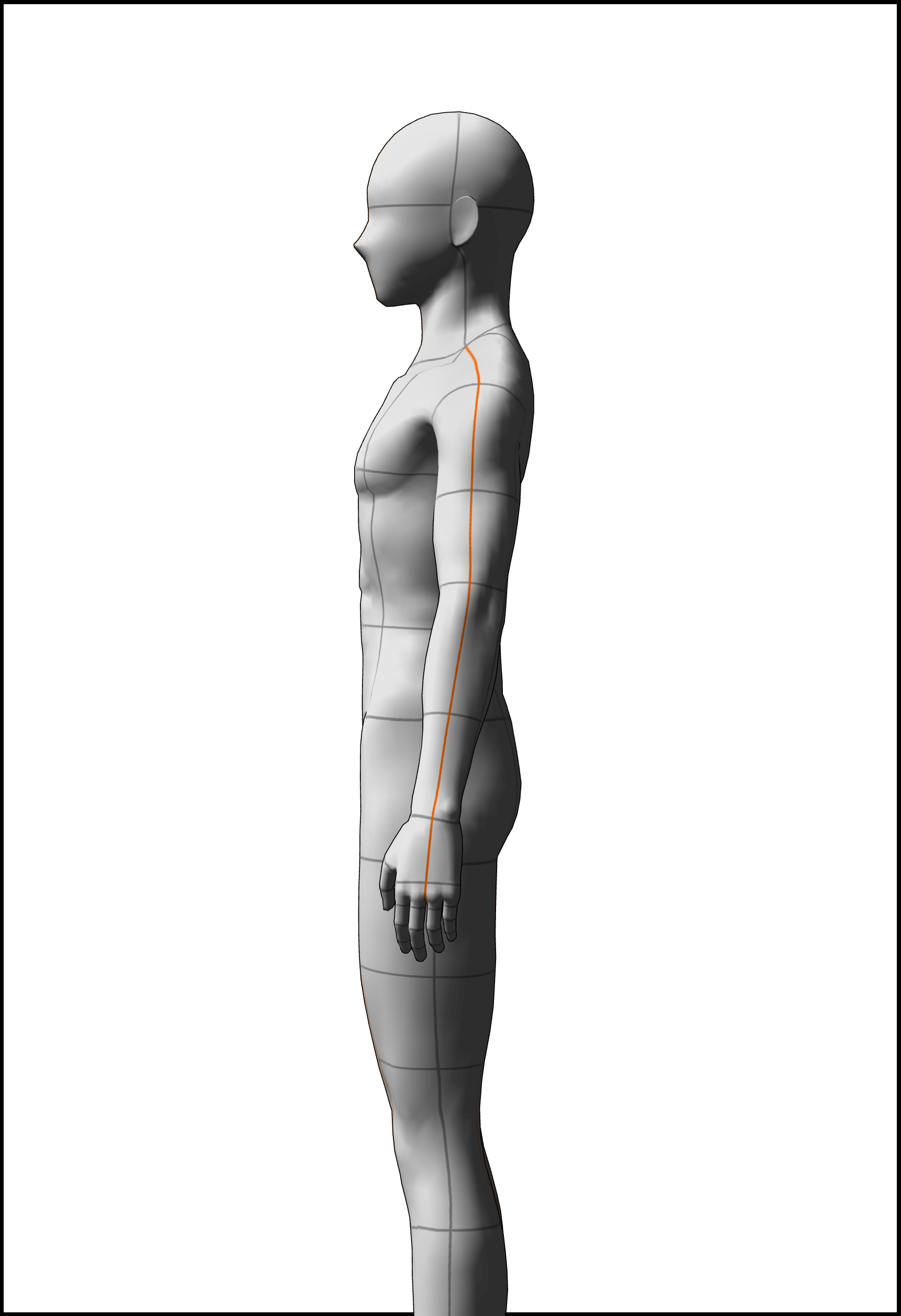
TorsoAngle の画像解説
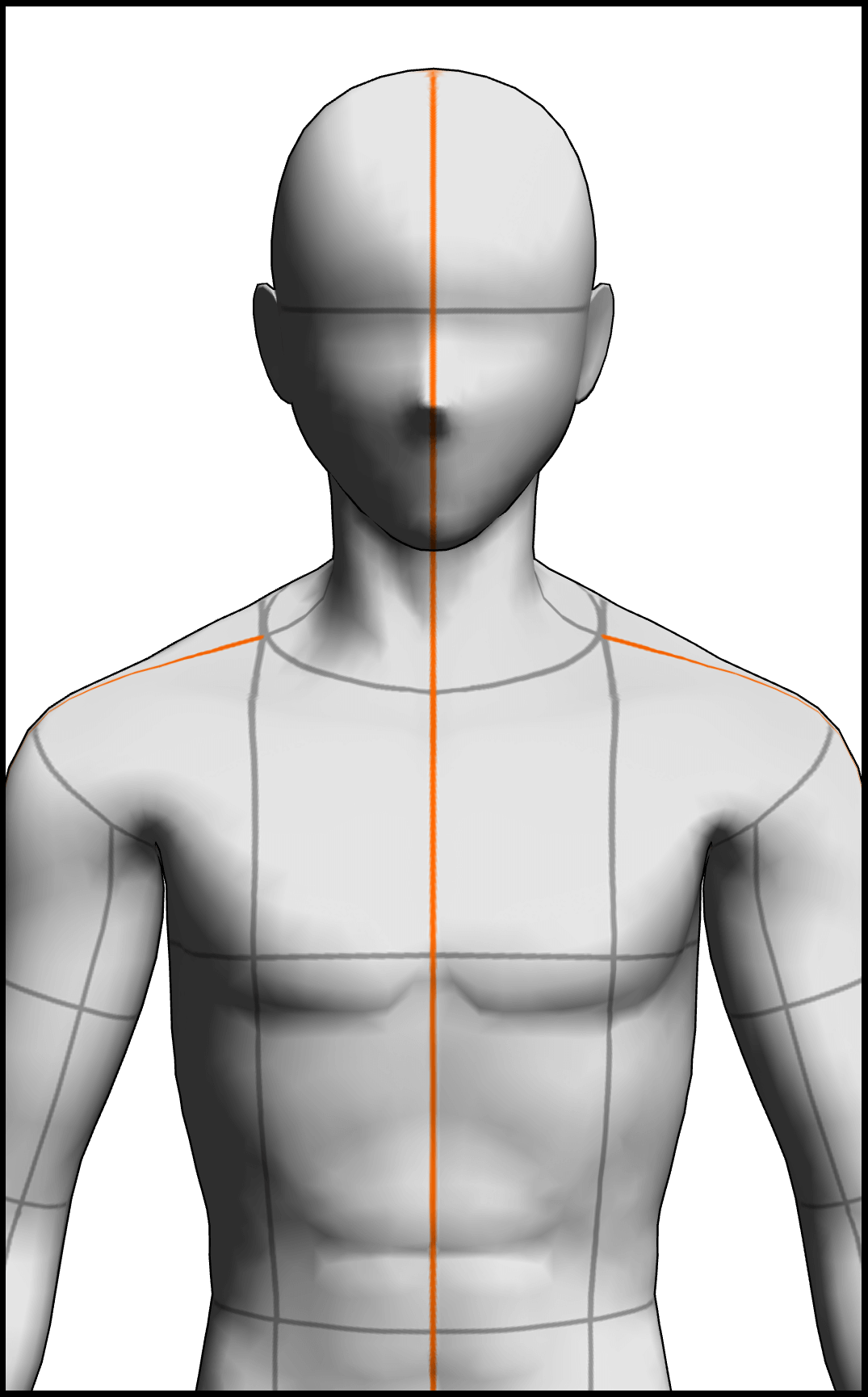 | 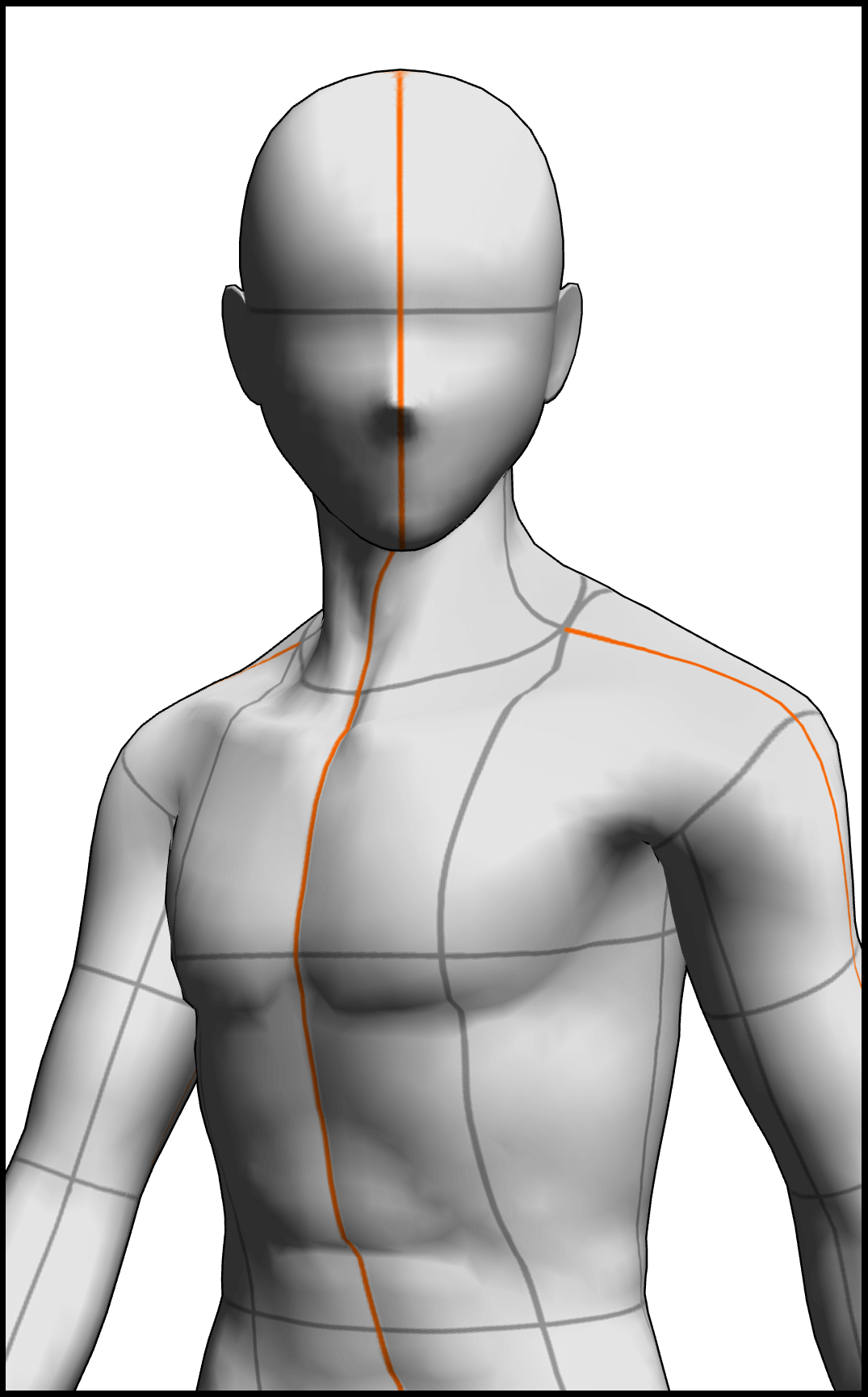 |
| 基本状態 直立 | 回転X 体をひねる |
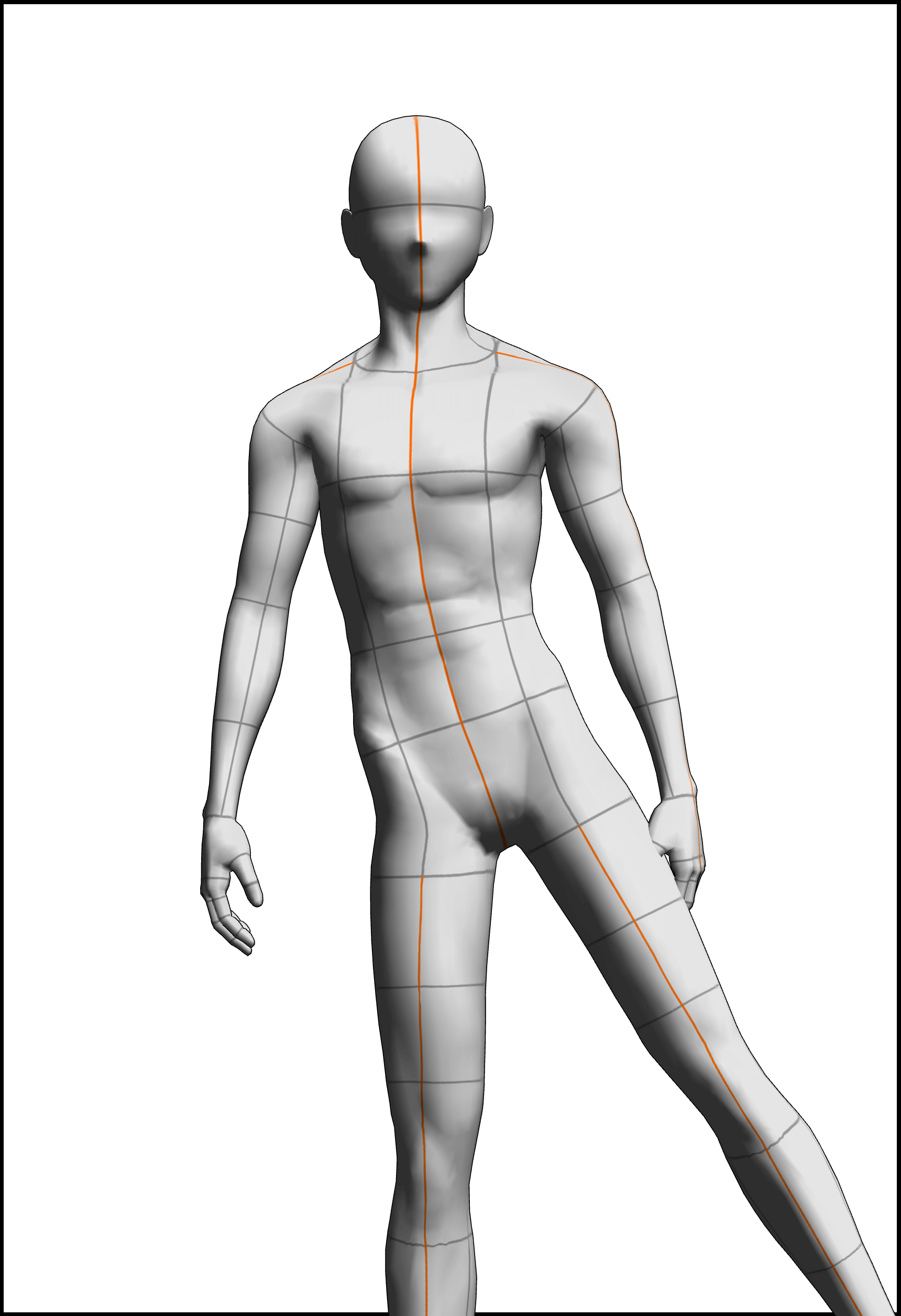
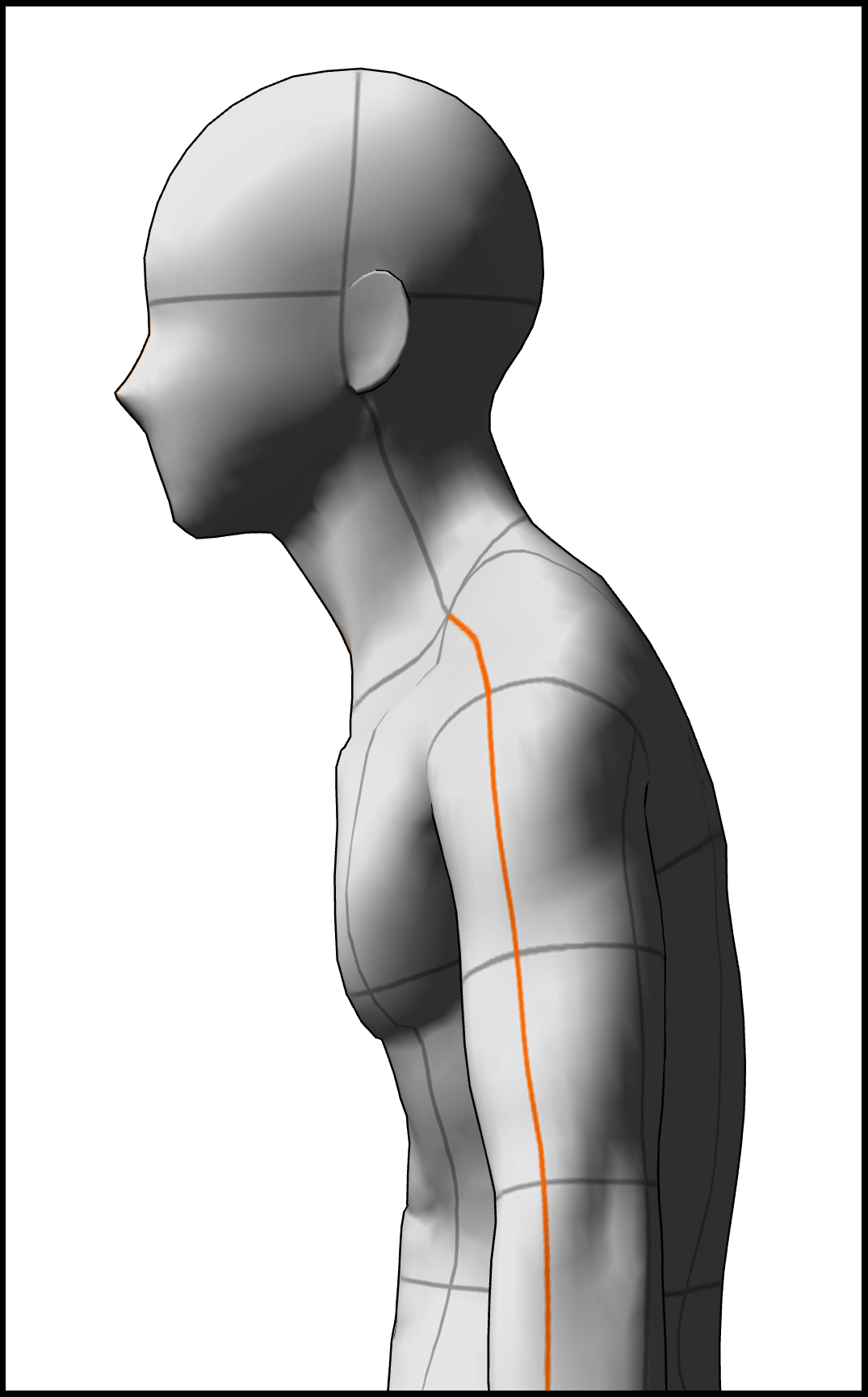 | 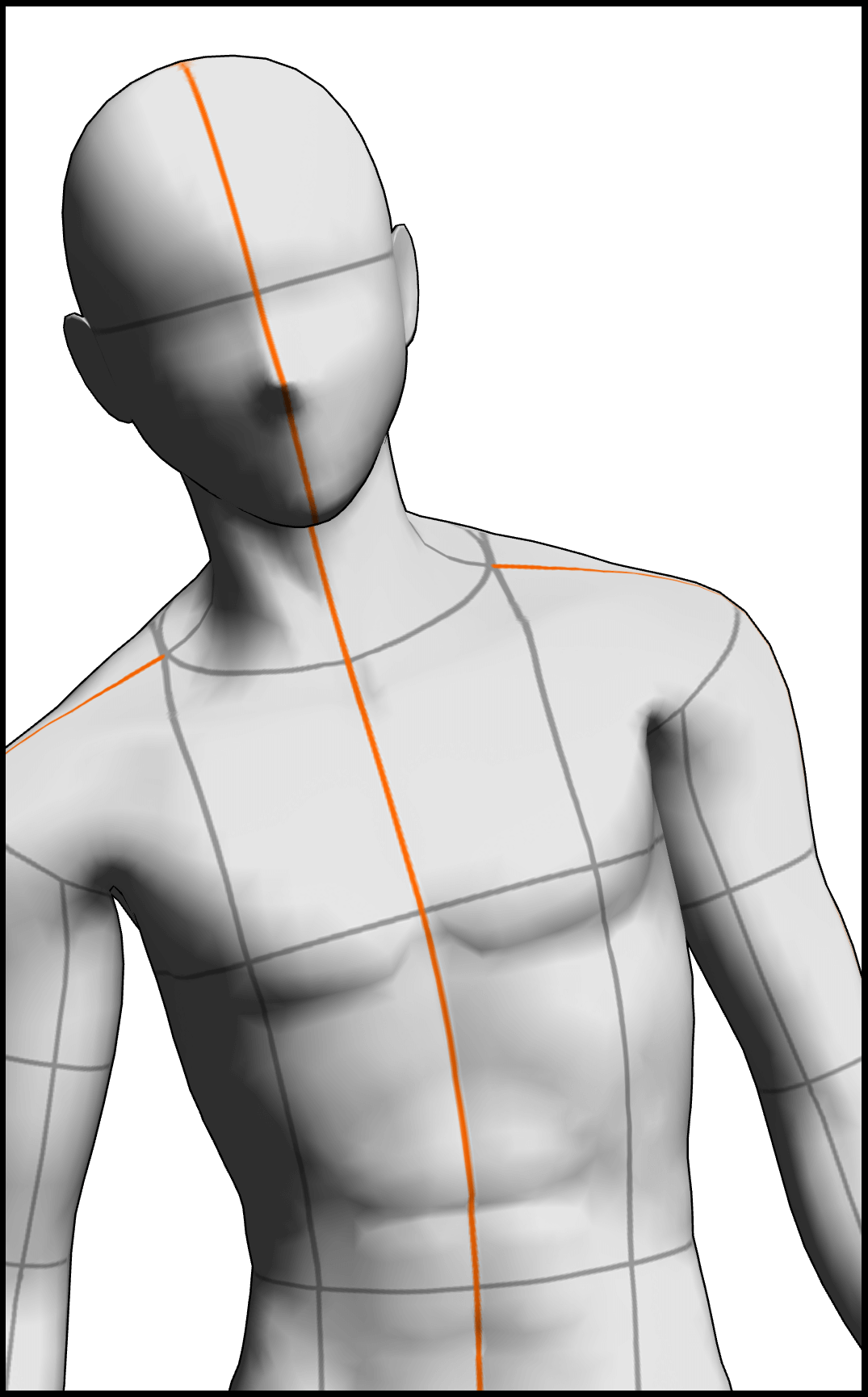 |
回転Y 猫背 | 回転Z 体を横に曲げる |
- BodyPositionX/Z
- 腰の位置
- 絶対座標で mocopi の基準位置からの差分
- BodyPositionY
- 左右の股関節のうち、低いほうの位置
- 絶対座標で mocopi の基準位置からの差分
左腕
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| UpperArmLeftAngleY | UpperArmLeftAngleY | 左上腕角度Y | -90 | 0 | 90 | 前が+ |
| UpperArmLeftAngleZ | UpperArmLeftAngleZ | 左上腕角度Z | -180 | 0 | 180 | 下が0、外が+ |
| UpperArmLeftAngleZRelative | UpperArmLeftAngleZRelative | 左上腕角度Z(相対) | -180 | 0 | 180 | 左上腕角度 – 上半身の回転 |
| LowerArmLeftAngleX | LowerArmLeftAngleX | 左前腕角度X | -180 | 0 | 180 | 手のひらが前で0、小指側が前で+ |
| LowerArmLeftAngleY | LowerArmLeftAngleY | 左前腕角度Y | -90 | 0 | 90 | 前が+ |
| LowerArmLeftAngleZ | LowerArmLeftAngleZ | 左前腕角度Z | -180 | 0 | 180 | 下が0、外が+ |
| LowerArmLeftAngleZRelative | LowerArmLeftAngleZRelative | 左前腕角度Z(相対) | -180 | 0 | 180 | 左前腕角度 – 左上腕角度 |
| ElbowLeftAngle | ElbowLeftAngle | 左肘角度 | 0 | 0 | 180 | 伸ばすと0、曲げると+ |
| ElbowLeftPositionX | ElbowLeftPositionX | 左肘位置X | -1 | 0 | 1 | 外が+ |
| ElbowLeftPositionY | ElbowLeftPositionY | 左肘位置Y | -1 | 0 | 1 | 上が+ |
| ElbowLeftPositionZ | ElbowLeftPositionZ | 左肘位置Z | -1 | 0 | 1 | 前が+ |
- ElbowLeftPosition
- 肩に対する肘の位置
右腕
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| UpperArmRightAngleY | UpperArmRightAngleY | 右上腕角度Y | -90 | 0 | 90 | 前が+ |
| UpperArmRightAngleZ | UpperArmRightAngleZ | 右上腕角度Z | -180 | 0 | 180 | 下が0、外が+ |
| UpperArmRightAngleZRelative | UpperArmRightAngleZRelative | 右上腕角度Z(相対) | -180 | 0 | 180 | 右上腕角度 – 上半身の回転 |
| LowerArmRightAngleX | LowerArmRightAngleX | 右前腕角度X | -180 | 0 | 180 | 手のひらが前で0、小指側が前で+ |
| LowerArmRightAngleY | LowerArmRightAngleY | 右前腕角度Y | -90 | 0 | 90 | 前が+ |
| LowerArmRightAngleZ | LowerArmRightAngleZ | 右前腕角度Z | -180 | 0 | 180 | 下が0、外が+ |
| LowerArmRightAngleZRelative | LowerArmRightAngleZRelative | 右前腕角度Z(相対) | -180 | 0 | 180 | 右前腕角度 – 右上腕角度 |
| ElbowRightAngle | ElbowRightAngle | 右肘角度 | 0 | 0 | 180 | 伸ばすと0、曲げると+ |
| ElbowRightPositionX | ElbowRightPositionX | 右肘位置X | -1 | 0 | 1 | 外が+ |
| ElbowRightPositionY | ElbowRightPositionY | 右肘位置Y | -1 | 0 | 1 | 上が+ |
| ElbowRightPositionZ | ElbowRightPositionZ | 右肘位置Z | -1 | 0 | 1 | 前が+ |
左手
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| HandLeftFound | HandLeftFound | 左手検出 | 0 | 0 | 1 | 既存、手を挙げると+ |
| HandLeftAngleX | HandLeftAngleX | 左手角度X | -180 | 0 | 180 | 既存、手のひらが前で0、小指側が前で+ |
| HandLeftAngleY | HandLeftAngleY | 左手角度Y | -90 | 0 | 90 | 既存、前が+ |
| HandLeftAngleZ | HandLeftAngleZ | 左手角度Z | -180 | 0 | 180 | 既存、下が0、外が+ |
| HandLeftPositionX | HandLeftPositionX | 左手位置X | -1 | 0 | 1 | 既存、外が+ |
| HandLeftPositionY | HandLeftPositionY | 左手位置Y | -1 | 0 | 1 | 既存、上が+ |
| HandLeftPositionZ | HandLeftPositionZ | 左手位置Z | -1 | 0 | 1 | 既存、前が+ |
右手
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| HandRightFound | HandRightFound | 右手検出 | 0 | 0 | 1 | 既存、手を挙げると+ |
| HandRightAngleX | HandRightAngleX | 右手角度X | -180 | 0 | 180 | 既存、手のひらが前で0、小指側が前で+ |
| HandRightAngleY | HandRightAngleY | 右手角度Y | -90 | 0 | 90 | 既存、前が+ |
| HandRightAngleZ | HandRightAngleZ | 右手角度Z | -180 | 0 | 180 | 既存、下が0、外が+ |
| HandRightPositionX | HandRightPositionX | 右手位置X | -1 | 0 | 1 | 既存、外が+ |
| HandRightPositionY | HandRightPositionY | 右手位置Y | -1 | 0 | 1 | 既存、上が+ |
| HandRightPositionZ | HandRightPositionZ | 右手位置Z | -1 | 0 | 1 | 既存、前が+ |
左脚
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| UpperLegLeftAngleY | UpperLegLeftAngleY | 左太もも角度Y | -30 | 0 | 30 | 前が+ |
| UpperLegLeftAngleZ | UpperLegLeftAngleZ | 左太もも角度Z | -30 | 0 | 30 | 下が0、外が+ |
| LowerLegLeftAngleX | LowerLegLeftAngleX | 左すね角度X | -30 | 0 | 30 | つま先が前で0、外が+ |
| LowerLegLeftAngleY | LowerLegLeftAngleY | 左すね角度Y | -30 | 0 | 30 | 前が+ |
| LowerLegLeftAngleZ | LowerLegLeftAngleZ | 左すね角度Z | -30 | 0 | 30 | 下が0、外が+ |
| LowerLegLeftAngleZRelative | LowerLegLeftAngleZRelative | 左すね角度Z(相対) | -30 | 0 | 30 | 左すね角度 – 左太もも角度 |
| KneeLeftAngle | KneeLeftAngle | 左膝角度 | 0 | 0 | 180 | 伸ばすと0、曲げると+ |
| KneeLeftPositionX | KneeLeftPositionX | 左膝位置X | -1 | 0 | 1 | 外が+ |
| KneeLeftPositionY | KneeLeftPositionY | 左膝位置Y | -1 | 0 | 1 | 上が+ |
| KneeLeftPositionZ | KneeLeftPositionZ | 左膝位置Z | -1 | 0 | 1 | 前が+ |
- KneeLeftPosition
- 股関節に対する膝の位置
右脚
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| UpperLegRIghtAngleY | UpperLegRIghtAngleY | 右太もも角度Y | -30 | 0 | 30 | 前が+ |
| UpperLegRightAngleZ | UpperLegRightAngleZ | 右太もも角度Z | -30 | 0 | 30 | 下が0、外が+ |
| LowerLegRIghtAngleX | LowerLegRIghtAngleX | 右すね角度X | -30 | 0 | 30 | つま先が前で0、外が+ |
| LowerLegRIghtAngleY | LowerLegRIghtAngleY | 右すね角度Y | -30 | 0 | 30 | 前が+ |
| LowerLegRightAngleZ | LowerLegRightAngleZ | 右すね角度Z | -30 | 0 | 30 | 下が0、外が+ |
| LowerLegRightAngleZRelative | LowerLegRightAngleZRelative | 右すね角度Z(相対) | -30 | 0 | 30 | 右すね角度 – 右太もも角度 |
| KneeRightAngle | KneeRightAngle | 右膝角度 | 0 | 0 | 180 | 伸ばすと0、曲げると+ |
| KneeRightPositionX | KneeRightPositionX | 右膝位置X | -1 | 0 | 1 | 外が+ |
| KneeRightPositionY | KneeRightPositionY | 右膝位置Y | -1 | 0 | 1 | 上が+ |
| KneeRightPositionZ | KneeRightPositionZ | 右膝位置Z | -1 | 0 | 1 | 前が+ |
左足
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| FootLeftPositionX | FootLeftPositionX | 左足位置X | -1 | 0 | 1 | 外が+ |
| FootLeftPosisionY | FootLeftPosisionY | 左足位置Y | -1 | 0 | 1 | 上が+ |
| FootLeftPositionZ | FootLeftPositionZ | 左足位置Z | -1 | 0 | 1 | 前が+ |
- 股関節に対する足首の位置
右足
| ID | 自動紐づけID | 表示名 | 最小 | 基本 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| FootRightPositionX | FootRightPositionX | 右足位置X | -1 | 0 | 1 | 外が+ |
| FootRightPositionY | FootRightPositionY | 右足位置Y | -1 | 0 | 1 | 上が+ |
| FootRightPositionZ | FootRightPositionZ | 右足位置Z | -1 | 0 | 1 | 前が+ |
この記事はお役に立ちましたか?
はいいいえ